Software Customisation
Reference Manual
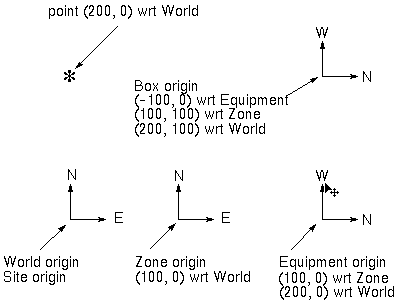
The result of ’Q (N 100 WRT /BOX1 FROM /* ) is different:
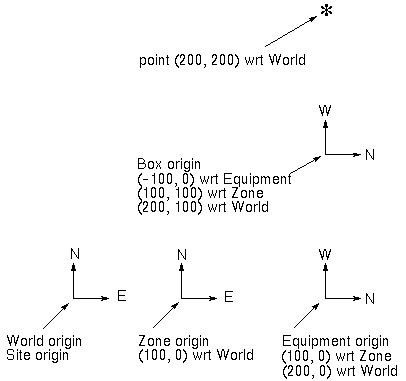
The result of ’Q (N 100 FROM /* )’ is different yet again.
For this we cannot mark an absolute point on the diagram since the default WRT will vary with the current element. In fact for the SITE, ZONE, EQUI the point ⊗ is marked in , and for the BOX the point coincides with the ZONE.